Description and purpose of the “M4 board”.
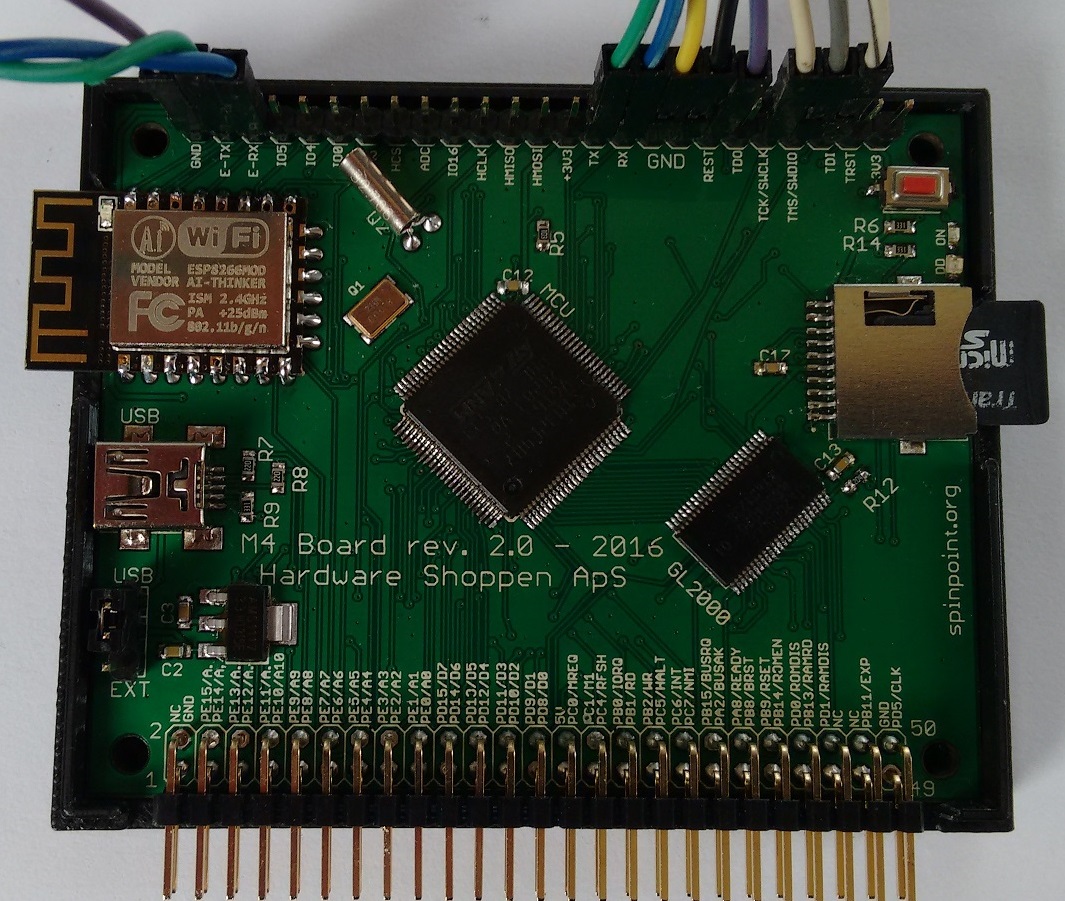
The M4 board, features as previously described a ST32F407 Cortex M4 MCU, connected via SPI to a ESP8266 WIFI module, and 18 GPIO’s routed via a GTL2000 voltage translator chip.
It was meant to be connected to the old the Amstrad CPC (z80 based) computer via it’s expansion port.
As with most old age computers, it runs with 5V I/O, here is where the GTL2000 chip came in handy.
The signals driven through the GTL2000 are output signals and the bi-directional data bus (D0-D7).
Input signals are connected directly to the ST32F407 Cortex M4 as it is 5V tolerant.
The idea was to provide WiFi to the Amstrad CPC, for easy and fast data exchange between it and a PC, but also direct internet access.
ROM BOARD emulation
First prerequisite was the ability to run code on the Amstrad via the M4 MCU so no additional loading (i.e. disc) would be needed.
It would be done by mapping a ROM in the Amstrad addressable space, this ROM would be in the M4 ram.
IORQ and WR will occur when a ROM is selected, data lines will contain the ROM number.
ROMEN and RD will occur when a read is happening from the currently selected ROM, address lines have the address, ROM data will be send back over the data lines.
A fairly trivial task, but the timing is tight having to bit bang the gpio, do direction changes on gpio’s mapped as data lines, even when the bus runs at only 4MHz.
Much time spent optimizing the handler in ARM assembler, it finally worked.
SD card storage
Being able to run code via the ROM board emulation, it would be nice to have native r/w storage.
A micro SD card slot connected to the M4 SDIO lines, was meant for this purpose.
An transfer interface from the Amstrad CPC to the M4 was designed.
Two I/O ports were assigned when an IORQ happened, one for receiving data on the M4 and one for telling it data was send, so it could process.
This was done as it’s easy to store data (low clock count), but takes additional time to process them.
When the 2nd port is written, the MCU sends BUSRQ signal to the Z80 CPU, which will ‘freeze’ the z80 CPU at the end of the current cycle, now the M4 has the time it needs to process the incoming data, before resuming the Z80 CPU and responding.
Responses are done in the ROM space, which of course is read only on the CPC, but R/W on the M4, as it is kept in the M4 ram!
Next up, was to hook the system bios/firmware functions, that do file related I/O to tape and disc on the original system and re-directing them to the sdcard.
Thus native file access from the SD card is possible, providing the CPC with up to 32GB (or more) of storage via SD card.
WiFi & Internet
In short the connection between ESP8266 and the M4 was done via SPI as IPC.
To allow internet/WiFi access from the Amstrad CPC itself, it sends a command to the M4, which again sends an IPC call to the ESP.
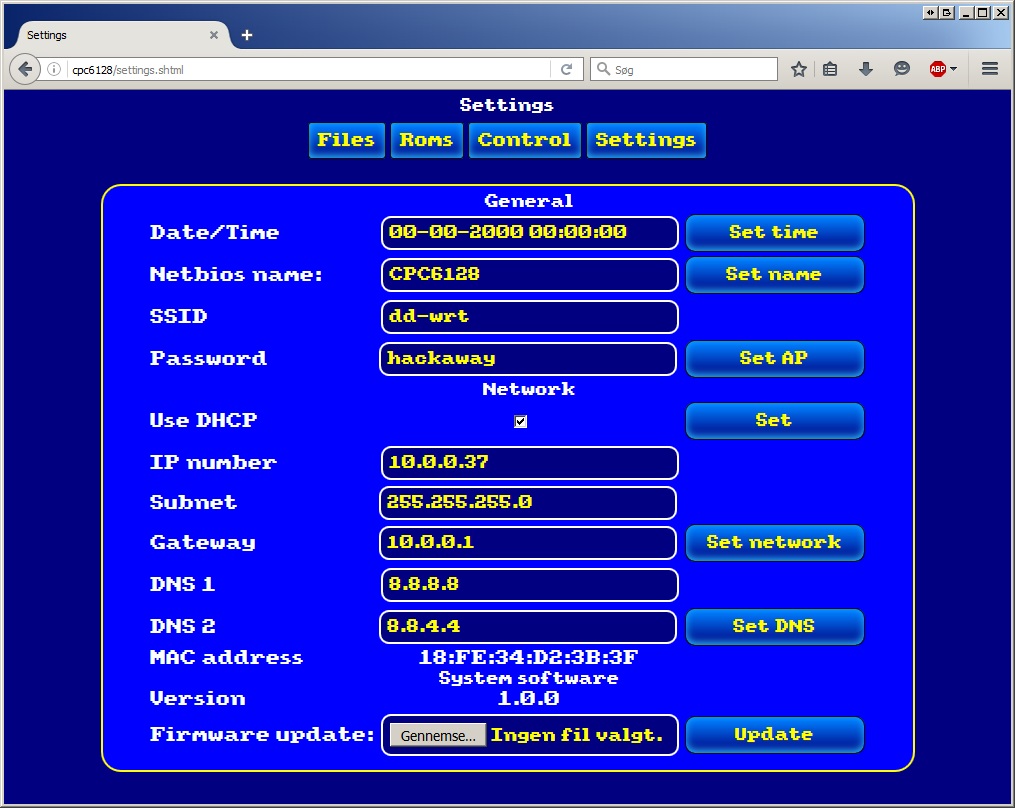
WEB interface
The ESP8266 hosts a WEB server, where various settings can be altered.

RTC
A battery mount was put on the board, making it possible to provide Real time clock as well via the RTC in the ST32F407.
What it does
Emulate Romboard, currently up to 16 roms, can be uploaded/removed via Web Interface.
Download files from internet via WiFi.
Mass storage to SD card, via native file I/O. R/W support. Emulated as drive A.
Can use DSK files on the SD card too, but only for file read access and sector reading via firmware call.
Upload files via web interface.
See a short demonstration here:
To do
Finish commands.
Lots of error checking.
Bug fixing.
More commands.
Other features.
Should anyone be mad enough to want a similar interface for their Amstrad CPC (or other suggestions), don’t hesitate to put a comment.
If enough are interested, I will run a batch + it’ll motivate me to finish and polish things up.
-Duke
That’s one cool board! 🙂
I’d have one in a crack if there was any available! 😉
Dabz
Hi Duke
I see this is an old post, but are boards still available (assembled)? I would be interested in one.
Thanks
Scott
Hi Scott,
They are still available (build on demand). Lead time is about 5-6 weeks.
Will email you shortly.
Regards,
Duke
Hi Duke, I’m also quite interested for one too. Can you please send me the details as well.
Me three
I am also interested in one, would be for the 464+, I live in Spain, please email me if you see the message.
Email sent.
Another one interested. CPC6128 here. Let me know if you still have available and the price. I’m in Spain.
I’m also quite interested for one too.
Please email me if you see the message.
Email sent.
Hi Duke,
I would love to purchase an M4 board as well. Please send me the details required to purchase.
Thanks bud,
Steven.
Hi duke,
I would like to buy a M4 board. Is it still possible ? I live in France.
Thanks
Hi Duke
are boards still available (assembled)? I would be interested in one.
Thanks.
Juan
Hi Duke, wow I just connected my old Amstrad cpc464 and was doing some research about it and found this amazing addon
I would love to have one if you are still producing it please send me an email, TYVM
Email sent.
Hi Duke. This looks amazing. I very am interested in the M4 board if you still ship them? I have a CPC464. Hope to hear from you.
Sincerely,
Jens, Denmark
Email sent. Same to all others.
If anyone DID not receive an email from me, please post again and let me know it did not arrive.
bonjour
je suis preneur pour une carte m4 board pour cpc
un prix ? comment pour le paiement ?
merci
steph
Hi Duke.
I’m interested in one M4 board.
Could you please send me an email with the details, please?
Thanks in advance.
Regards
Hi, I’d be interested in one for 6128 if any available?
Hi, I’m Marcos, I’m Spanish, excuse my English, I’m not a translator, I need an M4 Board, can you give me your email?
Hi Duke,
This is an absolute stab in the dark considering it is now the 21st of September 2022 but I will try anyway!
Do you still produce the assembled M4 Board for the CPC?
Many thanks,
Steve
Hi Duke
Congrats for the grate work.
would you please send me insteuctio s to purchase an M4 for my CPC464?
regards feom the US!
Juan.
Hi Duke!
Same here… CPC464 in the need of ur great M4… waiting for instructions for how to purchase it!
Thanks and ciao from Italy!
Gus
Hi Duke, I would like to order one M4 board for my new old Schneider CPC6128. Can you email me ?
Come get some 🙂 Greetings, Moritz
hallo
i want buy a mi4 Board
please tell me,what I make for order this.
I live in thailand
Hi Duke,
Interested to buy the m4 as soon as possible. CPC 464 here.
Thank you!
Dan
Please can I order an M4 board for the Amstrad CPC 6128 plus, if they are still available? Thanks
Thanks.
A batch will be made as there has been a lot interest. More info can be found at: http://www.cpcwiki.eu/forum/amstrad-cpc-hardware/amstrad-cpc-wifi/
Leave a message here, or at the forum if you want one.
Hi Duke, I’m interested in this fantastic board. I’m from Spain. When you can please email me. Thanks.
Email was sent. Let me know if did not arrive.
Hi Duke,
I am interested as well in the M4 for my CPC. I am sorry as this is the second time I post asking for info, but I am afraid that the first post is lost and won’t be replied. It would be shipped to Spain. Thanks!!!
Sorry, I forgot to tell it is a regular cpc 6128.
Hi
Very nice interface! Is the software/hardware open source? I’m interesting on emulating it on my spectrum and cpc emulator, ZEsarUX. I have already emulated other sd interfaces, like the divmmc, zxpand or the divide
Thanks!
Currently it’s not open source. I haven’t decided about that yet !
Hi Duke,
This is one cool board.
I really like the web interface feature.
Could be mad enough to want one, if the price is right. 🙂
Any thought on how much is it going to be?
(Probably very early to ask, but… 🙂 )
Will this board have extra RAM, like on the Symbiface II interface?
(I am not sure, this might not be necessary, maybe becasue of Symbos compatibility….)
What filesystem can be used for the SD card? Fat32?
I own a Schneider CPC, will it be possible to connect this board to
its centronix expansion ports?
Tamas
Hi Tamas
Thanks.
The price is going to be 40 euro for the board. There is no RAM expansion build into it, I originally wanted to add another 64K (from the 192K of the cortex) but there is simply not enough processing time for the code logic, when also doing romboard emulation and I/O port transfer.
Filesystem is plain fat 32.
For the Schneider, yes, but you need a cable (not included with the board). You can look for MX4 (MotherX4) it should work with that.
Check out the cpcwiki forums too, there is a lot of talk about it: http://www.cpcwiki.eu/forum/amstrad-cpc-hardware/amstrad-cpc-wifi/
Hi Duke,
Thank you for your response. I believe the price is reasonable.
I am definitely interested, please count me in for one board.
Do you have any idea when a batch could be released?
I am not being impatient, I just would like to know
when I need to get the payment ready. 🙂
(Weeks, months…)
One more question, does this board need any external power
source? If yes, can you recommend one that would work with it?
Thank you
Tamas
Tamas,
I hope about 4-5 weeks for the first to start shipping, I need to make a lot so I don’t know how long it will take.
It should be OK with the CPC power supply, but you can also use an external USB power supply (5V, 1A).
Hi,
So not earlier than June/July…
OK, thanks for all your answers and for doing this!
Please let me know when it is time to purchase. 🙂
(But I will try to monitor the cpcwiki.eu forum,
I am a member there.)
Tamas
Hi Duke
Well done. I’m *really* interested in such a M4 and also might offer some very limited time in tests, bugfixing and extension. The main question resides on the M4: is it running an OS, or is it a native running application, handling the IO? I assume the later one. So some more info might be neccessary for contribution on that (I’m not an ARM specialist).
Thanks. I’ll note you down for a board.
The M4 is not running a OS, just bare metal. Firmware for first release is as good as ready.
You can check what it does here:
http://www.spinpoint.org/cpc/m4info.txt
-Duke
Hi Duke. Firstly, thanks for making things like this board. And secondly, I am really interested in a M4 too, if it is possible. Regards.
Hi Manuel
Thanks. The first batch of boards is sold out already, but if atleast 10 more want one I will do a new batch (2 out of 10 now, so I think it’s possible). I’ll put you on the list.
Thanks in advance!
Sorry, I forgot the connector. It would be an edge connector. Thanks.
Hi Duke. I received (months ago) and…it is outstanding! I wonder if it would be possible to ask for another M4, this time with a MX4 connector (it’s for a 6128+). Thanks.
Hi Manuel
Good to hear. Yes it’s still possible to order more, there’s a bit of processing time needed (a couple of weeks).
-Duke
I would love one of these! 🙂
Just let me know which type of connector you want and I’ll add you to the list.
Price and info is here:
http://www.cpcwiki.eu/forum/amstrad-cpc-hardware/amstrad-cpc-wifi/
I would like one, please!
Ok, I have added you.
I got mine yesterday, these boards are awesome! In a stroke it replaces the X-Mass, X-Mem* and HxC devices.
Now we have to simply hope a FTP Client and IRC Client are written to use this card on the CPC 😉
Craig
* OK you still need the X-Mem for the ram expansion.
Hi, I’m interested in acquiring this amazing piece for my Amstrad CPC 6128. How can I order? Cheers.
I’ll send you an email
Please Duke, I need buy two and m4 main board too.
Send a email to me. Thanks!
Email sent.
Hi,
I want a M4 with Edge connector (I do not own MX4 board, so, i have to connect directly to my CPC).
Thanks!
Hi Duke, I’m interested in acquiring this fantastic piece for my Amstrad CPC 6128 too; how can I order?
I don’t know if it is neccesary to have any connector or similar or not, or I can connect it directly, please tell me ok?
Congratulations, awsome job.
Email sent.
Hello
How can I order this board?
thx
Email sent.
Yep! Send me one asap!
Hello Duke,
I would like to order a M4 board with MX4 connector and a PCB adapter assembled. Can you email me back?
Hi;
I would like to buy one, but I don’t know how ?
Replied via email.
I know I’m kind a late, but it is possible to get the M4 board still?
I think my CPC 6128 needs this! Please let me know how to get hold of a board I can directly use with my machine.
Yes, you can use it directly with your machine. I’ll send you a pm shortly.
Would love to buy one too! Is it possible to be added to the list?
Hi, I’d love to buy one of these too! Would it be possible to be added to the list?
Duke, thanks for the email, I’ve emailed back with the details!
hola DUKE.
Quiero 1 M4 board con un conector para un amstrad cpc versión española y otro conector para amstrad cpc plus versión española.
te puedes poner en contacto para poder tenerlo. muchas gracias
ahora te lo pongo en ingles con google, por que yo solo hablo español.
Hello duke
I want 1 M4 board with a connector for an amstrad cpc spanish version and another connector for amstrad cpc plus spanish version.
You can contact in order to have it. thank you very much
Now I put it in English with google, because I only speak Spanish.
Email sent.
Hello,
I am from UK. This is such an amazing project and good to see CPC is still being expanded even in 2016.
I would like to purchase a board if possible?
Please let me know if it is possible, thank you. I have CPC464 & CPC6128
Kind regards,
Hello! Congrats for the amazing project. I would like to buy one M4 board. Please contact me back to arrange.
Thanks in advance!
Email sent.
Hi, I purchased one M4 board from Duke last June (I think it was the first batch…). I ordered it with edge connector. Now I have an MX board and I would like to plug the M4 to it… Somebody is interested (including you Duke) in an exchange… My board is in excellent state … I only plugged it a couple of times and it works perfect… Thank you in advance
Best regards
Hola.
Soy Manel, de España. Ponte en contacto conmigo si aún tienes el interface. El conector Edge es para los primeros CPC, ¿Verdad? Gracias.
Si, pero me gustaría conectarlo a la MX4… He pedido un cable que aún no me ha llegado. Cuando me llegue lo probaré si no quedo satisfecho podría cambiarte la M4 Edge connector por una M4 Centronics o vendértela y comprar otra a Duke con conector centronics… Mi email es jomicamp@hotmail.com
Hello there, Duke.
Interested here on one unit when available.
Please count me on.
Hello Duke,
Congratulations on the project.
I would be interested in an M4.
Please add me to the list.
Thank you.
Hello duke
Congratulations super.
I’m interested to buy one M4 board for my cpc 464.
Please I want one I love my cpc 464
Thank you
Hello.
Thanks for this amanzing project. Do you expect to make an unit with RAM Expasion? It would be the major achievement I can imagine together with unlock 8.3 chr name limitations. Would you modify this in the future or your card will be as is?
I own a CPC6128+ and a CPC464. Centronics and Edge Connectors. Maybe is possible to get a conversor to use in both systems, doesn´t it?
Thanks again and merry Xmass.
Hi
Sorry for late reply, just got home from xmas holidays.
As it is, I don’t plan to make a version with RAM expansion. There is no 8.3 char limitation anymore, latest firmware has |ls command and support long filenames.
For connectors, it is possible to buy version with MX4 (plain IDC) connector and I also have cables:
MX4 to Edge connector adapter 7 euro (for regular CPC464/664/6128)
MX4 to Centronics connector 7 euro (for CPC+ and Schneider CPC6128).
Hi. Count me in. Ready when you are. 🙂
email sent.
Hi, I’m interested in acquiring this amazing piece for my Amstrad CPC 6128. How can I order?
Thanks, this is fine. Email sent.
Hello Duke! I’d like to buy one board for the Amstrad cpc6128. Congratulations for the project.
Thanks. Email sent.
Hello
This looks really fett. I’d like to order one with the edge connector (regular cpc 6128) if it’s still possible.
Thanks.
Email sent.
Hello Duke,
I’ve been just reading the cpwiki thread. Really fantastic job! Congratulations. Seems the final device for Amstrad CPC, from my point of view of course.
That’s why I would like to know if I am not too late to order 1 board, with Edge connector, vertical position (I think it is the current version). My CPC is regular CPC6128.
Thanks a lot!
Thanks! You are not too late, email sent!
Hi Duke
Been getting back into the CPC scene after a few years and just found out about your fabulous work on cpcwiki.
I’d like to order 1 board with edge connector for my regular 6128. If that’s still possible please send me the relevant info.
Thanks
Thanks. It’s a good time for the CPC 🙂
Email sent.
Amazing project! I’m very interested in buying this marvel for my 6128 Plus. Thanks
Thanks 🙂
Email sent.
Hello, Folks.
I just received this some kind of miracle yesterday. I had only time to do a few tests. My first impression: MUST OWN FOR CPC.
Amazing transfer speed. Lots of improvements in this updated 2.0 firmware. I had to do a lot of research but I´m glad with my Little beauty.
Note: Tested only on my CPC6128 PLUS. Need to to things on standard 6128 and 464.
I am interested in one plus two adapters one for old school CPCs and one for the plus range. Would that be possible?
email sent.
I am interested in M4 Board
email sent.
Hi Duke I would like to order one of these with MX4 connector. Many thanks.
Hi Duke,
Very nice project ! I’d like to get 2 of these boards.
Thanks
Thanks, email sent.
Hello Duke!
I’d like to buy one M4 board.
thanx
Alberto
Email sent.
Hi, I’m interested in acquiring this great piece for my Amstrad CPC 6128.
Thanks in advance.
P.D.: You are my new God!
lol, thanks.
Email sent.
Hi!
I would like to buy am M4 board with edge connector (CPC464 & CPC6128).
mvh
Jon
Email sent.
Hi there,
I own an Amstrad CPC 6128 and would like to buy an M4. Am I right in thinking that I can store DSK images on the SD card in the M4, and then run DSK images from the M4? Would I need any additional software? Is it fairly easy to use? Which would be the best M4 to get so that I can mainly run DSK images and get W-FI access?
Nandan
Yes it can use DSK images, just as shown in th video. No extra software is needed, everything can be configured via a browser, aswell as uploading DSK’s and files.
The M4’s have same functionality, only difference is the connector (PCB layout has also changed a bit, but its only cosmetic).
Email sent.
Hi Duke
I’m interested in an M4 with an edge connector.
Thanks
NG
email sent.
Hello,
I would love to buy one of these boards, please could you contact me? 🙂
email sent.
Hi, I would love one of these to please.
I have a CPC6128 with an IDC socket (pins) soldered onto the edge connector to if you can send one that has no connector fitted then I can take it from there.
I have Paypal and CC but not BC. I would prefer Paypal if you can do that.
Do you still have some in stock or will it take a while?
I am in Australia.
Email sent.
Hi!
I would like to buy am M4 board with edge connector (CPC464 & CPC6128 spanish version).
Thanks
A.Garrido
Hello
I would like to buy M4 board with edge connector (CPC464) spanish version.
😉
thank you
R.Frau
This interface is cool.
I would like to buy one from You to my old CPC6128.
Hi Duke,
I would like to order a M4 with edge connector.
Thanks!
Hi Duke,
I’d like one with edge connector please.
Thank you.
Please may I order one for my 6128 plus?
how much do they cost and how do I get one
For edge connector model (for regular CPC), price is 43.5 euro + 3.5 shipping.
How to get one? Put a message here like you have done or in http://www.cpcwiki.eu/forum/ and I will get back to you.
Hello,
I would like tu buy tour Edge connector modelo (for regular CPC), how can I get one?
Email sent.
could I purchase a M$ with edge connector for my CPC464 please (UK)
thanks
Great retro-hack! Wifi password = “alansugar” >>> Respect! 🙂
Could I order a M4 Board for my CPC 464 (UK model)?
Hi, duke. I would like to order an m4 for an amstrad 6128 Spanish model. I wait for your email when possible. Greetings and thank you
Hello. I want to buy one M4 board for me. I heve got a Amstrad CPC 6128. Could you tell me if I can buy one for me? thanks
Hi, Duke, I am very interested in purchasing an m4 board with mx4 connector, with two cables, one mx4 to centronics (for my 464 plus) and the other mx4 to edge (for my cpc 464), waiting for your news, greetings
Nice work, dream is become reality, and now, I wanna absolutely this wifi card for my 6128…
How can I have this treasure? Mail me a link to buying this jewel! PLEASE!
Hi i want to buy your M4 versión for plug directly to my cpc. Please tell me how can i get one of this cool add no. Regards
Hi! I would like to buy an M4. And one question. Can it write to the SD disk, or only read?
It can write directly to the FAT32 filesystem of the microSD card.
It cannot write inside DSK images yet.
Hello Duke, I wanted to say your work is amazing! It made me want to fire up my old Amstrad again.
I would like to order a M4 board with edge connectors for my CPC 6128.
Thank you!
Hi Duke,
Seen a youtube video on the M4 Board and I will be getting a Amstrad CPC6128 but the drive is faulty (I suspect a drive belt has gone) for which I have ordered a replacement drive belt. I am interested in purchasing the M4 board for the CPC6128 which I believe I will need the MX4 to Edge connector.
One question if I can repair the internal FDD how will the M4 board work with the internal FDD?
How much would it cost for the board and connection cable for shipment to the UK?
Can you send me an e-mail containing updated pricing inc. shipping to UK for both the board and cable.
Thanks in advance
Edwin
Yes, it will work along with the internal FDD (|disc use disc drive, |sd use sd card).
M4 board is available with both edge connector and IDC/MX4 connector (which will need a cable for Centronics or an adapter for Edge connector).
Email sent.
Hi I am also insterested in buying an M4 wifi board for my CPC6128 please.
I wonder if you can email details on how to buy if you’re still producing them and pricing. I’m in the UK.
I’m hoping to buy it all ready made and ready to go so it can just plug in the back of the 6128 please with the connectors etc already in your kit?
Thanks again.
Hi I emailed also about ordering an M4 board but I was also looking at a PACE RS232 with a Wifi232 modem so I could connect to a BBS with my CPC. Does or will just the M4 board support this by itself? That would be really useful if possible?
As for BBS. I don’t know, there is commands to connect to the internet (ie. httpget) and a sockets interface, so it should be possible to write software for this.
I don’t have any plans to do so myself though.
Hi there, really interested in buying one of these if still available?
Cheers
Yes, still building them on demand. Email sent.
I am also interested in getting one or two. Can you also send me order info pls?
Hi there! This is fantastic! I am also insterested in buying an M4 wifi board for my CPC6128 with Edge connector, could you send me details how to order it. Thank you.
Hi!
I am also insterested in buying an M4 wifi board for my Schneider CPC 6128. Please send me details how to order it. Thank´s
Hi Duke!
I’m fascinated about your M4 board.
Will still be possible to get one to use it on my Schneiders? (CPC 664 & CPC 6218) I also have Amstrad CPC 464/472, but not sure if any additional hardware should be needed for those…
Could you send me some details on how can I order one, please?
Kind regards
Dear Duke,
some days ago, after dedusting my Schneider CPC 464 and replacing the belt in my DD-1, i found out, that almost all of my about 30 year old disks still work fine, as well as my tapes do.
Searching for a possibility so backup my old programs (from 1985 – 1991) to a more up-to-date medium with the option to copy it to a pc, I found your great project that may fulfill all my wishes. 🙂
Now, before ordering one, I have two questions:
First, is it possible, to use your board together with the DD-1? E.g. using the PCB adapter? Probably this was already answered somewhere, but yet I haven’t found.
Second, long time ago I build a battery buffered memory for the 464. To connect it, I made a breakthrough into the housing of the DD-1 controller and soldered an edge connector on the back of the controller. Some kind of classical passthrough directly on the controller board.
Do you think I can connnect the M4 board to the CPC using this connection? Or does the M4 have to come first for some reason?
Due to the 90 degree solution, I am tending to order the M4 with MX4 connector and the pcb adapter. Please send me an email concerning that order.
It will work fine together with DDI-1. And I think it should work with your passthrough connector aswell, but yes my 90 deg adapter might be more handy and not dependant on the DDI-1.
Will email shortly.
Hi Duke,
I just found about your board, and I’m interested in buying one. Can you send me the details of how to order?
Thanks!
Hello Duke,
Could I have one of these wonderful boards for my Amstrad CPC 6128, please. Please let me know method of payment. I live in Sydney, Australia.
Many thanks,
Adam
Hey Duke!
That’s an amzing thing you did there and I would love to order one M4 Board for my Schneider 464
Vielen Dank für die grandiose Arbeit! Ich bin schon sehr gespannt!
Sascha
I just learned about the M4. Great! Are the boards still available for purchase?
I would love to have one of these.
If they’re still available please let me know
Hello, I would be interested in a card assembled, if they are still available or when they could be. If it is the case, please I would ask for details about price, means of payment etc. I am writing from Spain.
I would love to owe one, please if you do another batch, take me into account
Many thanks!
Hey.
Really cool device. I’ll take one for my CPC 464 if you run another batch. Thanks 🙂
BR,
Mathias
I also would like to buy M4 (or any other additional hardware you make) for Amstrad CPC464.
Please email me…
Prof. L
Hi Duke
There seems to be renewed interest in more of the M4 boards
and I’m one of them 🙂
I’d be interested in a couple if you do a new batch
Cheers and thanks for creating this masterpiece
How do I buy one of these, please let me know!!
Duke,
I too am interested in the M4 if you are producing another batch.
Regards,
Mark
Hi Duke. I’m from Spain and I’m interested in M4 card, M4 mother board and connection cables for CPC464. I wait your answer. Thanks
Hi Duke.
I’m interested in the M4 board for CPC 6128.
Living in Norway.
Regards,
Lennart
Hi Duke and All
Will be more than happy to buy an M4
Thanks,
Happy new year!!!
Best
I’m also interested in buying one M4 if you’re running anothr batch.
Thank you for your awesome work!!!
Hello!
I’m interested in buying the M4 board for my CPC 6128.
Best regards,
Christos.
Hi Duke,
How to receive a fantastic kit “M4 board” for a CPC464 and 6128 ?
It’s a great job…
castman.fr
As you did, you post here and I will email you back. Thanks 🙂
OK, thanks Duke.
I come back to you as soon as it’s possible for me.
See you.
Hi, Duke!
I would be interested in getting an M4 board too, if possible 🙂
Hi, I would like to buy a M4 board too, can you put me on the list ? Thanks a lot and have a nice day
I am interested in buying a M4 board.
Thank you in advance.
Please can you contact me back in regards purchasing an M4 board. Thanks
Hi Duke
I would like to buy another M4 board please. I have moved my existing one from my 6128 to my 6128 Plus (and it’s great on there), so would like a 2nd one for my 6128.
Thanks
Chris
Hello, I also want to buy a M4 Borad for my cpc – Thanks in advance!
Hello,
I am interested in buying the m4 board.
I live in Greece.
I’m desperate for one of these boards too. I’m in the UK. Where do I sign up? Awesome work.
Hi Duke,
I’d like to buy one of your M4 boards for the CPC 464 I just manage to acquire.
Thanks,
Roddy.
Hello,
I’d like to buy M4 board too if still available for a trashed 6128 plus I saved last week and back to near mint state 🙂
Hi Duke, I am interested in buying the M4 board for my cpc. Greetings and thank you.
Hi, this M4 board is just what I am looking for! Can you tell me how I can get one for my 464?
Thanks 🙂
Hello mr duke please im looking for m4 can you tell me how can i buy one ..many thanks
hi, i’m looking m4 board for my 464, can you tell me how can i buy one?? thanks
hello Duke,
I too would like to buy an M4 card.
thank you.
Hello,
1st Thanks for the great work done on our old CPCs.
2nd, May I ask you how I can buy one M4 Wifi Board?
Regards
Yann
Hello,
I’m interested in one M4 board.
Best regards,
F.
Hi there,
I would like to get one M4 board, latest pcb. I live in Greece. Can you please provide me info about cost, availability, shiping, payment method,etc?
Kindly Regards
Hi.
I’m interested for this.
How can i buy it and where??!!
You are in the right place 🙂
I have sent you an email with details.
I would love to get one of these if they are still available?
Email was sent.
I would love to get one of these if they are still available?
Hi Duke, please can I purchase one of your latest M4 interfaces, I wish to run dsk roms + more from sd card and this would be a great interface with the wifi ? Any info greatly appreciated Thanks, Jamie
Email sent.
I would like to buy M4 board. Is it still possible?
Thanks.
Yes, it is still possible.
Email sent.
Hey Duke. I’m interested in one M4 board for my CPC 464. Please, tell me if it is still available. Thank you so much.
Hello,
I would like to buy your M4 board. It looks amazing. Please tell me if it is still available. Thank you.
Regards,
Jimmy
Hi, I’d love to buy one of your boards for my CPC464, EDGE connector.
Thanks
delcotron
Hello Duke,
The same is true for me. I’m absolutely fasinated about your work. Could you please let me know how to order a M4 for my CPC 464.
Thank you very much
gary
Hi,
Can you give me instructions to order a M4 for my CPC 6128 ?
Thanks!
Hi Duke,
Amazing work! Is it still possible to order one? Thanks!
I’de like to have one, can you please send me a mail ?
Hi Duke good night I would like to get one M4 Board with Edge connector for my cpc 464 please could you mail me?
One favour is it possible registered post sending no matter if its more expensive its because I dont have po box so I have to go to the post office with the tracking number
thanks a lot
Hi Duke, I’m interested in this board. I’m from Spain (Amstrad CPC464). When you can please email me. Thanks.
Hi, i am interested too in this magic board. Thanks!!!!!
Hi Duke,
Please can I order 2 of the latest M4 boards with IDC connectors
thank you,
Kris
Hi, this looks fabulous. Congrats on producing such a popular item! Can you kindly advise me how I can purchase one, please? Many thanks, J
Got here after seeing the telnet client. Would be interested in board plus connector if you’re planning another batch thanks.
Hi,
May I have one for AmsTRAD CPC 6128 please. It has a male extension slot 25+25 pins.
I am more interested in sd-card than in WIFI.
Thanks.
Hi Duke,
Hope my msg finds you in good health 🙂
I would like to get one M4 board for my 6128.
Post to Greece.
Can you please provide me info about cost, availability, shiping, payment method,etc?
Thanks in advance.
Hi Duke !
I’m interested in the M4 board wifi/sd card for CPC 6128.
Living in France.
Regards,
Fab
Yes, please!
Is this available?
Hi interested in one M4 wifi + SD
Hi, I‘am also interested in the board.
Cheers
Lennart
I would like to order an M4 board as well. Do you ship many of these to the USA?
No, not many Amstrad CPC’s were sold in the US.
Email sent.
Hi Duke. I’m interested about the M4 Wifi +SD for my old CPC464. I’m living in France, Normandie
Regards
Gianni
I’m interested in one of these boards for the 6128 Plus, I’m in the UK.
Email sent (twice).
I’m interested in M4 Board for the 464, it is possible?. I’m from Spain.
Thank you in advance
Hi I’m also interested in an M4 board, can you let me know if you have any stock and how to order?
Cheers
Nic
Wotacleverbloke you are! Rebuilding my CPC6128 empire and very interested in the M4 board; please email details. Cheers, from sunny Gloucester, England.
Thanks!
Email sent.
Hi,
I’m interested in the board for a CPC6128.
I’m based in Spain.
Thanks!
Hi,
I’m interested in this M4 board for CPC464. I live in France. Thanks.
Hi,
I’m interested in this M4 board for CPC464. I live in France. Can you give me more informations fotr buying it? Thanks.
Hi,
I’m interested in this M4 board for CPC 6128 plus .I live in France. Can you give me more informations for buying it ?
Thanks.
Email sent. Let me know if it did not arrive?
I did not receive anything
It’s ok, Spam….
Hi Duke
I guess I’m probably not the only one here interested in your work and in the M4 board. Living in France as well with a few CPC6128 and I would probably be interested in a couple of boards.
Any idea when you would be able to sell more units?
Looking forward to reading from you!
Thanks.
Yes, I still keep making batches. Current wait time is about 6 weeks from order confirmation.
Email sent.
Hello Duke
Just wanted to thank you for the board and the amazing work! I’m super happy with it, connecting to the internet with my CPC is really fun.
Thanks and good to hear – much appreciated!
Hi Duke,
It looks like you have put a lot of well-spent time into this, well done. I have a CPC6128 that I just got running again and am interested in purchasing an M4 board.
Are you in a position to sell another unit?
I would like to add my name to the list for your next run.
Best Regards,
slippy17
Hi! Do you still have any of these M4 Boards available? If so could you let me know prices etc?
Thanks!
Hi Duke,
I’m interested in this M4 board for CPC 6128 plus .I live in France. Can you give me more informations for buying it ?
Hi Duke,
I’m interested in this M4 board for CPC 6128 .I’m from Spain. Can you tell me how to buy?
Regards
Email sent.
Hi Duke – same again please, M4 to the UK enquiry!
Hi Duke,
I also would be interested in a board, please. Do you ship to Germany for a CPC464?
Thanks & Regards
Sven
Hi Duke,
I am interested in an M4 board for a CPC6128 – I am in Canada. If still available, please let me know the details.
All the best,
Stefan
Email sent.
Hi Duke, I would like to buy the M4 board for my regular CPC6128 that has an edge connector. I live in Finland. Would you please send me instructions, how to proceed with ordering?
Email sent.
good afternoon duke…
i’m interested in buying one of your M4 boards if you have any available, or if you’re intending to build a another batch, if you could email me some details it’d be much appreciated, thank you… 🙂
Email sent.
Bonjour,
Super content de ma première carte, je désirerais en commander une autre pour CPC6128Plus si disponible.
Pouvez-vous me dire les démarches S.V.P.
Merci
Good afternoon Duke. I recently bought a CPC 464 and I intend to learn some assembler with it.
I am interested in buying an M4 board if possible. I would appreciate it if you could send me an e-mail with the information. Thank you very much.
Email sent.
Hello,
I have a CPC 464 (PCB connector) and a CPC 6128 (centronics connector). I would like to buy an M4 board. Do you also sell a cable for the centronics connector?
Dear Duke,
Me again. Please send me an e-mail telling me the purchase conditions.
Email has been sent but undeliverable!
“The reason for the problem:
5.1.0 – Unknown address error 550-‘5.1.1 User unknown:”
So it seems your mail server is not setup for the email address you have used.
You can email me directly at duke spinpoint.org .
Hi Duke,
could you please send to me the information to buy one M4 board?
thanks!
Would love one of these boards – edge connector version.
Can you please send again, I think I saw “M4” disappear when I was emptying my spam folder 🙁
re-sent.
Hello,
fot the following cpc’s:
– 6128 plus
– 464 with edge connector
– 6128 with edge connector
– 6128 with centronic connector
What I need to buy, how much and how ?
Thanks.
Email sent.
Hello, Duke,
Thanks for the work you are doing in the CPC community. Can you please send me details on how to purchase an M4 board please.
Thanks
Hello Duke, how are you, hope well. I’m interested in your board edge connector (straight to cpc port) please. It is possible to send to Madrid (Spain). And in this case What will be the final price?.
Thx in advance.
Hi Duke
Recently managed to find a CPC6128 here in Australia. What a great project! I’m interested in purchasing an M4 board, please send me details for placing an order
thanks
Matt
Hi, I’m interested in M4 Board for the 464. My friend Vincent GR told me about that great stuff. Greetings from Greece
I’d like to buy a m4 board for a cpc6128. From Barcelona Spain. Would it be possible?
Hi, how can we buy this ? Thanks a lot
Greetings from France.
I would like to buy one card for my amstrad cpc 6128 ? How could I proceed ?
Thanks.
Greetings from Hungary, I would like to have this great product for my Schneider CPC464. Please let me know how to buy one. Thanks in advance.
Hello from France.
I’d like to buy one for my Amstrad CPC 6128+.
Can you please send instruction by email ?
Thank you.
Hi Duke
Is The M4 board wifi for an Amstrad cpc 6128 with edge connection on the board of the computer, would be still available ?
Very interested in buying one ?
Let me know how to handle with the purchase if available and shipping to France.
Awesome job !
Kindest regards
Hello,
I’d like to order a M4 board for my 6128+ please.
Thanks a lot & Regards 🙂
This is the most amazing board ever seen in an Amstrad.
I love it. Thanks a lot
Thanks for the feedback. Good to hear 🙂
I would really like to buy an M4 with edge conne for for my 6128. Are they still available to order?
They are! Email sent.
Hi. Please could I order an M4 for the CPC 464?
Interested in purchasing a M4 board for an Amstrad 6128 with edge connector. Please quote for including shipping to the USA.
Hi Duke. I have a CPC464 and just got a cable to TV now in color just repaired the tape drive , my first computer and would love to get one M4 board if possible. Please let me know how can I get one. Many Thanks
Good afternoon Duke, I’m in Madrid, interested in a M4 board to use with mi CPC 464. Please contact me with info.
Regards.
Hi Duke,
I would also be interested in buying one of these wonderful M4 for my 6128.
Do you still build and sell them?
Cheers,
Yes, I still make them!
Email sent.
Duke, would it be possible to let us know where we can purchase boxes to protect the M4 and which revision of the board is being sold?
Thanks,
The current revision is v2.5C (for when I can again source chips).
There is 3d printable boxes available:
M4 board revision 2.0 EDGE connector, by povvercrazy:
https://www.thingiverse.com/thing:2645945
M4 board revision 2.0 EDGE connector, by gschizas:
https://www.thingiverse.com/thing:3280950
M4 board revision 2.5B IDC connector, by Rick_B-Lair:
https://www.thingiverse.com/thing:2858771
M4 board revision 2.5C EDGE connector, by carlesoriol:
http://www.thingiverse.com/thing:4829910
M4 board revision 2.4, 2.5B & 2.5C, both IDC and EDGE connector, by yawor:
https://github.com/yawor/m4board-enclosure
So I guess you will have to find a 3D print service if you dont have one yourself.
Hi,
I am also interested in buying an M4 board, have an 6128 with Centronics port.
I suppose I need the following?
M4 Board with MX4 (IDC) connector
Centronics to MX4 (IDC) cable
Thank you very much.
Hi Duke, I have just discovered the M4 board. Great possibilities ! Could I buy one? Is it compatible with the expansion / floppy port of a 464 or 6128? Thank you in advance. Joël (Dour Belgium)
Hi
Looks like I’m one of a very long list and a latecomer at that. Are you still making these to order?
Hi. Please could I order an M4 for the CPC 464?
Hi Duke,
I own a 464 since I was 8 (now 43). I was saving it till my little daughter was older showed her how such a prehistorical gadget could consume so much of her father’s free time at her same age.
I ran across your amazing project and I wonder if I could still get one of those great M4 cards. It seems I will not be able to wait so long to dust my CPC off.
Thank you very much and congratulations for your amazing work.
Regards,
Fer
Hi Duke. Great stuff. Can i get a price please for a CPC 464 plus – latest model/updates please.
Does the 464 + m4 version work with a normal 464 too. A friend if mine needs one for a 464 normal too was planning on demoing it to him. Great project and well done you. Shipping to London. Thanks. Don
Hi Duke!
Amazing work, super excited to see what you’re building. Would love to get an M4 for a CPC6128 if you’re still making them.
Thanks a lot in advance!!
Fer
I have discovered the M4 board, and I felt in love. If it works for CPC-464 I need one…
Is it still available? Where can I get one?
Hello. I hace and ola cpc464 and I World like to hace a M4. Is it possible?
Hello,
i’m would like to buy a M4 Board for my CPC 6128.
Thanks for your work =)
Hello, I would like to purchase a M4 board. Are they still available?
Hi there. What an amazing work ! I am also interested in buying one board (maybe more).
I live in France.
Thanks for keeping in touch and making the cpc scene live
Thank you.
Email sent.
I was stunned. Is incredible!!
I have CPC464 and would like to revive it. I am interested in the M4.
I await your reply.
Thank You.
Hi again! Wondering if there are any boards available now? Would love to acquire one – it’s awesome work!
Thanks in advance
Hi!
I would like to have one!
How can I get one and where?
I’ve just become a (rather surprised) 464 owner and looking at the recent comments here I can see there’s still plenty of demand for M4 boards so would like to add myself to the list of interested parties, whenever the next batch get made.
Hello Duke,
How are you?
Im quite interested in purchase a M4 card.
Would you please, contact me, and tell me the process to be follow?
Thanks in advanced
Hello Duke, I am interesting to buy a M4 card for my CPC 6128.
I hope there is some available.
I am waiting your email.
Thanks in advance , George.
Hi Duke, I’d like to buy 2 M4 cards one for a CPC464 and the other one for a 6128+.
Thanks, Juan.
Hi Duke! Please, send me the info for getting one. Thank you!
Hello duke i’d like to buy m4 for my 464 and my 6128.
Can you send me by mail price?
I’m waiting your mail
Greetings from the USA! Would it be possible to get my grubby hands on a M4 board as well? I have a CPC 6128 collecting dust in a corner and this would be an awesome way to put some life back into it. Thanks!
Hello. I am looking for the M4 card for a CPC 464. Is it possible to buy one and for what price? Thank you very much for your answer. Have a good day.
Sylvain (France)
Hello Duck and I am also a taker if you have a card for CPC 6128. Thank you very much.
Sylvain (France)
Hi Duke,
I’m interested in one M4 board for my lovely CPC 6128 plus.
I’m from USA.
Thanks.
Hi Duke,
your M4 board looks great, I’d like to get one also for the CPC 6128. Are you still making them?
Regards
Nice work Duke, I’d also love to purchase an M4 Board, please get in touch if you’re putting a batch together.
Regards,
Hi Duke,
I currently have an M4 board, but when transporting it, I’ve managed to break off the SD card slot.
If I send it to you with a payment, could you repair it?
Otherwise I’d like to buy another!
Thanks
May I buy your broken one for 25 eur? I can fix it probably but it will be not factory repair after and no warranty it will need fix again.
Hi Duke,
I’m interested in purchasing a M4 for my CPC 464. I’m living in Spain. Please, may you send me the details? Thank you and congratulations for so great work
Enrique
Hi Duke,
i would like to have one for my CPC464 with an Edge Connector.
I also would need a MX4 to Edge connector adapter is needed.
how much to send to Germany?
greetings
Armin
Hi Duke,
did you send an email? i didn’t found anything in my mailbox neither in SPAM
Hi @Duke,
I have recently acquired a CPC6128 and I have come this far, and your project seems amazing to me. I would like to buy one of your M4 plates. Thank you very much and congratulations for your work.
I would like to buy one for my Amstrad CPC6128. Including the assembled Adapter PCB.
Hi Duke,
I was wondering if you are planning on releasing the schematics/PCB and firmware as opensource/openhardware.
I would be very interrested in looking at how you’ve implemented things.
Hope to hear from you.
Cheers,
Eric
Eric,
At this point in time, I am not planning to release the schematics, gerbers or the firmwares. All the CPC side source code is released, check my github repo link in upper left corner of this site.
Maybe at a later state (could be sooner if the chip shortage is not resolved soon), when I no longer want to build them myself.
Greets,
Duke
HEllo Duke.
I am interested in one m4 board ( i have one 464 and one 6128)
Best regards.
Congratulations for this excellent device. I’m interested for one with the cpc6128 Schneider expansion port. Can you tell me the cost and shipping to Cyprus?
Hi,
What a great project!
I’d very much like to purchase an M4 Board with an edge connector for my CPC464.
All the best,
Tom (UK)
Hi Duke,
This is a wonderfull & great project, congratulations!
I’m interested to purchase an M4 board with edge connector for my Amstrad CPC6128. Can you reply for the price and details for payment with shipping to France ? Thanks a lot in advance.
Regards,
Olivier
I just had some trouble with my M4. Intermittent CPC boot.
It was the power select switch. It’s been transported to a couple of houses and used a lot so it’s just wear and tear.
Just thought I would mention it.
I’m very grateful to have this.
Hello Duke.
I am interested in one m4 board i have cpc 464, im from Spain
Best regards.
Hi Duke
is it still possible to buy one of your great M4 board for CPC ?
it is for use in the context of a computer museum in Belgium, we have different models so we can accommodate various connectors depending on what is available. It will help us keep software easily alive on these great machines (currently using zaxon’s budget drive)
kind regards
christophe
Hi Duke,
Are you still making these? If so can you let me know a price including the cost of shipping to the UK, the expected lead time plus preferred payment options.
It would be used on a CPC6128 with a ‘4 Slot Expansion Backplane ‘.
Thanks’
Keith.
Hi Duke I’m interested in an M4 if your still making them.
Hi Duke,
What a great project!, do you still make them?, if so, i’m very interested in buying one M4 board for my CPC collection, it would be used on various CPCs (464, 472, 664 and 6128), directly connected to their edge connectors.
Thanks in advance and best regards,
rJus
Hi, Duke.
Simply awesome, great… No words!!!
I’m searching for, at least, one of these M4, so please contact me to let me know the price if you still make them.
Thank you in advance for you brilliant contribution to Amstrad’ World
Regards,
Marcos
Hello, i am discovering the M4, it’s a great device
Is it possible to buy one ? can you tell me the price with shipping to France ?
Thank you by advance, your work is really great
Best regards
Florent
Hi Duke
I’m interested in an M4 board for amstrad cpc 6128 plus.
Is it possible to buy one?
Thanks
Hi Duke,
I recently acquired my first CPC 464, and I’m very excited to use it. I’m interested in getting an M4 so I can use it for development and discovery.
Is it still available to purchase?
I would love to purchase an m4 board. Recently purchased a 464 after having one during my childhood. Excited to explore the possibilities.
Hello, I’m interested in purchasing an M4 board if possible for my 464.
Thanks
Hi! Is M4 still available? I want buy one for my 6128. I’m from Spain.
Kind regards
Hello I’m also interested in the M4 board and the Imperium solo controller for my cpc6128, I’m from France.
Thanks in advance!
Kind regards
Hi, I am also interested buying M4 board and solo controller.
Thanks
Hi Duke, I’m interested in purchasing an M4 WiFi board if possible for my 464..
But are boards still available ?
Can you please send me the details and the price as well.
Best Regards Markos.
Hello,
I’m keen on purchasing a M4 WIFI for my CPC 6128. Could you kindly provide more details about the product, along with the cost and shipping charges to France?
Thank you,
Antoine
Hi Duke,
I‘d like to buy an M4 for my CPC 464.
Can you, please, send me details to order?
J.
Email sent (again). Please check junk/spam if not received.
Regards,
Duke
Hi. Are you still selling these? I want one for my 464. Feel free to drop an email. If you’ve a link to a store or Ebay, that would be great too. Thanks
Hi Duke,
I already purchased an Edge version in 2022 . Now I need the non-Edge version. Please send me instructions by e-mail.
Regards,
Olivier
Hi Duke,
I am very interested in the M4 board. Could you email me the instructions to get one?
Thank you.
I’m a lucky owner of an Amstrad CPC 464, purchased in 1990 in a remote shop in southern Italy. I would really like to connect it to the internet to chat on BBSes. How can I purchase your M4 module?
Thanks.
Daniele.
Hi Duke.
I would be interested to purchasing the M4. Can you tell me how I can do it?
Thank you.
I’m also interested in purchasing the M4 wifi. Can you tell me how I should do it?
Thank you.
Hi Duke.
May I know what the payment methods are?
please reply to email correspondance rather than over messges here.
Hello from Belgium Duke.
The French cpc community told how wonderful is your M4 board.
As I plan to clean up and upgrade my cpc 6128, I’m interested in acquiring one.
May I ask you to send me the details about how to order one?
Thanks for your excellent work.
B²
Hi Duke,
I’m also interested in purchasing the M4 wifi.
Can you tell me how I should do it?
Thank you
I’m interested in purchasing the M4 wifi for my 464.
Do you have a order form?
If you should make another batch of M4 boards I would be interested in purchasing one.
Hello Duke
how can we get this M4 card. where to buy it?
many thanks
Ben
Hi Duke,
I would like to get a M4 card please, if that is still possible. I live in Germany. Could you send me the instructions how to order the card?
Many Thanks!
Fabian
Hello Duke,
I have a CPC 464 and I am interested in the M4 card.
Can you tell me how I can order one?
Thanks!
Gert
Hello,
I would like to but a M4 board too, van you send me the price and instructions to buy it?
Thanks
And happy new year from France
Damien
Hello Duke,
i am interested in your M4 Board with cable if possible/available:
1) one piece for my Schneider CPC 464
(+ cable with MX4 to Edge connector adapter)
2) one piece for my Schneider CPC 6128 with Centronics connector
(+ cable with MX4 to Centronics connector)
Please, can you send me some infos?
Best reguards
Thomas
Hi Duke,
I have a CPC6128 and CPC464. I am interested in the M4 board.
Can you tell me please how I can order one or two?
Thanks!
Mark
Yet another person in 2024 interested in buying an M4 board 🙂
I hope you’re still interested in making them!
hello
can i still buy one M4 Board ?
Hello – I would love to purchase one of your boards. Thank you.
Hello Duke!
Would be possible to buy one of your M4?
Thank you!
Hi Duke,
just saw your amazing work! I still have my CPC464 and would like to bring it back to the future with an M4 board. Do you still offer any?
Best regards
Chris
ciao Duca
tempo avevo preso da te una m4 board e va benissimo e non solo …ancora grazie …ora volevo sapere se ci fosse un programma terminale che permette il collegamento con le bbs in generale ok
fammi sapere la mia mail e
Check out this one:
https://github.com/fergusleen/m4ewenterm
/Duke
Hello Duke,
I am interested in your M4 Board with cable.
Best regards
Laurent
I’m interested in the M4 Board as well 🙂
It is still getting manufactured?
Henri
Yes, I am still making them, although it requires some patience being on the waiting list :-/
Hi,
I would also like to buy a M4 board for my 464. Could you send my a price indication as well as instructions on how to order?
Thanks!
Hi Duke, please can I be added to the waiting list, would really like to get one of your M4s
Hello Duke,
I would like to be added to waiting list for order of M4 Board also. I am not sure what versions there are, but I’d be interested in one that will work on CPC-6128 and CPC-464.
Regards
Jack
Hi. Any chance of ordering a M4 board.
I know their is a long waiting list. Thanks
Hi Duke,
I already purchased an Edge version in 2022 . Now I need the non-Edge version. Please send me instructions by e-mail.
Regards,
Olivier
Hello Duke,
additional to the other speakers…..
Do you already sell the M4 or M7 board?
Thanks
Frank
Hello Duke,
how can i buy this M4 Board?
Thanks again
Frank
check your junk/spam mail, because I have replied some time ago already.
Hola buenas Duke
Quisiera poder comprar una M4 board , saludos
Is possible to buy this board?
Thanks duke
Hello Duke,
How to buy your M4 wifi ?
Thanks
-TWO-MAG->
I’d like to order one too what is the process,
Thanks for this amazing board
Hi,
I may also be interested in an M4 board. Can you provide price information on it? Thanks.
Bonjour jour Duke, je serai intéressé par une carte M4. Merci de me l’a faire parvenir.et me dire comment payer. Cordialement. Régis.
Good night Machine!
How much cost M4 board for Spain?
How long?
Thanks
1 m4 board please fully assembled Uk 🙂 thanks!
Hi Dear,
Is it possible to order you one of these incredible M4Board please?
Kindest regards, Mark.
PS : Shipping would be to France.
Hola Duke.
Vaya inviento mas bueno que has creado.
Por favor, ¿Me puedes informar del precio de una M4 para Amstrad CPC 464 , si es posible encargar una y plazo de entrega?
Muchas gracias.
Muchos saludos.
Hello. I have an Amstrad CPC 6128, and I would like to buy un M4 card to use it to telnet into my Linux box. I live in Spain. Please, let me know how to buy one. Thank you!
Hello Duke,
I would like to buy a M4 Board for my Schneider CPC 6128.
Please contact me.
Thanks and regards
Hello Duke,
Would you have an M4 board for sale? I bought one before but I managed to wreck it, and need a new one! 🙁
Hi Duke.
I’m interested in one M4 board for my Amstrad CPC 6128
Could you please send me an email with the details?
Thanks in advance.
Best Regards from Greece
Kostas
Hello
is the M4 board still available ?
Hello.
Pls send info on how to order.
Thanks!
Hi i want to buy one fon my cpc6128 plus
Hi Duke.
I’m interested in one M4 board for my Amstrad CPC 464.
Could you please send me an email with the details?
Thanks in advance.
Best Regards from Canary Islands (Spain)
Luis
Hi Duke.
I am interested in one of the M4 boards for the Amstrad 6128.
Hope to hear from you in the near future with details, cost and postage.
Many thanks, Peter
Hi Duke.
I’m interested in M4 board for my Amstrad CPC 464.
Could you please send me email with the details?
Thanks in advance.
Best Regards from Madrid (Spain)
David del Hierro
Hi
I would would be interested in an M4 board
Thank you
regards
Pierre
Hi Duke,
I’d also love a M4 for my 464 if you’re making them still and can ship to Australia.
Thanks,
Michael
bonjour je vos avez envoyer une mail pour pouvoir commander la carte wifi M4 pour amstrand cpc et je n’ai jamais eu de reponse je fais une autre tentative pour en commander une ca fait au moins trois ans ou plus merci pour pour reponse mr Lorieux Johny je suis en france
Hi. Any chance of ordering a M4 board please?
Send me details . Thanks.