During the last few days, my server provider had a server failure.
After some effort I was able to put the site back up, now running on my own servers.
I think the website is now fully functional again, but the mail server is still not 100% OK, so please have some patience, if you have emailed me.
I will put an update here once I am sure mail server is fully functional, and I will have to ask you to resend any mails within the last week. My apologies.
And no worries, I am still building the M4’s, just behind schedule as always…
/Duke, 17th of March 2024
Update, 18th of March 2024:
Incoming mail server seems to be fully OK now. Please re-send any emails send during the last week.
My outgoing mail server still needs some work not to be seen as a spammer, so please check you junk/spam folders, when expecting a reply from me. Thanks for your patience.
A new firmware for the Imperium Solo USB now adds support for the AGA Amiga console, CD32. All original controller buttons are supported (granted your USB controller has enough) – See the CD32 mappings in the Imperium Solo Database .
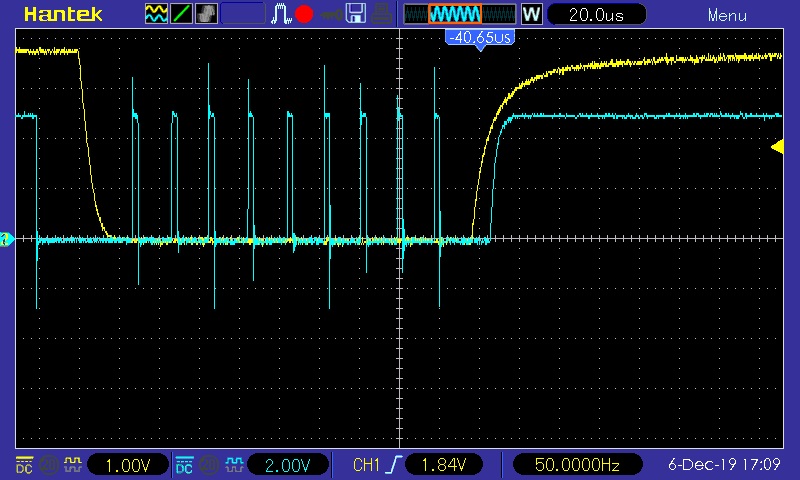
The CD32 was a little tricky, like the SEGA MD/Genesis as it has more buttons than wires. So it switches between regular joystick mode and an “Assert , CLK, serial stream”-scheme to give information about the extended buttons.
Here is what it looks like on the scope:
Lastly a short video showing it in use:
Notice that I made a seperate site for Imperium Solo, here:
Where you can see the database of tested Game controllers and mice, along with their button mapping.
Imperium Solo USB is an adapter to support modern day USB game controllers (&mice) on retro hardware. Today I am happy to announce that I added support for the great SEGA MegaDrive/Genesis console. It was not all trivial, due to the SEGA 6 button mode, which is now fully supported by Imperium Solo USB, granted you have enough buttons on your controller, check the database at the Imperium Solo infosite.
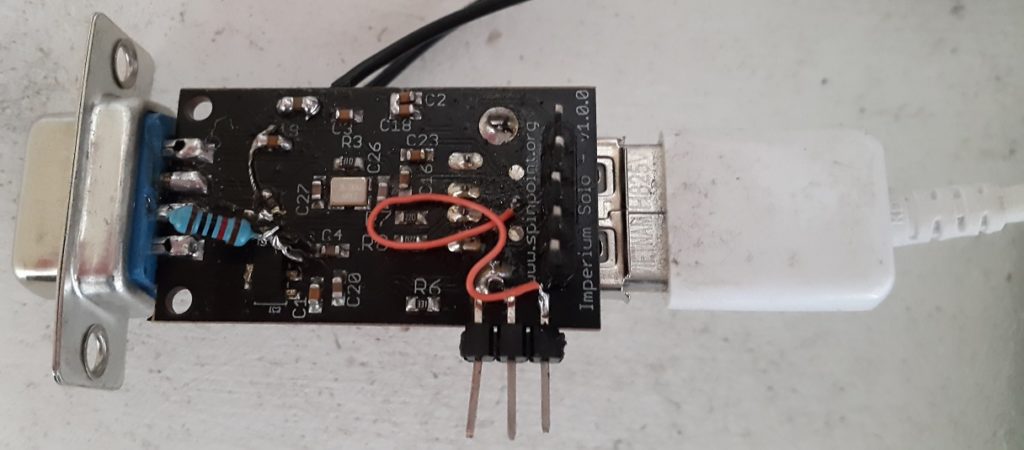
Furthermore SEGA choose to use VCC on another pin than the “atari-standard”, thus existing Imperium Solo PCB’s are not able to support it. However it was added as configuration option in PCB rev. 1.0.4. External power can also be applied via a USB micro socket (standard mobile phone charger would work), if extra power is needed. Options are configurable via jumpers.
Here’s a short video demonstration:
Notice that I made a seperate site for Imperium Solo, here:
Where you can see the database of tested Game controllers and mice, along with their button mapping.
Finally got around to writing the firmware changes needed to support Amiga and Atari ST via the Imperium Solo USB adapter.
Here’s a video of Amiga version:
Atari ST video:
When I release the firmware updates, you can re-program the existing Imperium Solo C64 hardware with them, but not the Imperium Solo Amstrad CPC, as there is jumper settings via 0 ohm smd resisters that needs to be changed to be used on other hardware than the Amstrad CPC.
Notice that I made a seperate site for Imperium Solo, here:
Where you can see the database of tested Game controllers and mice, along with their button mapping.
Small update on the Imperium Solo project initially released for the Amstrad CPC. Made some changes to the firmware and changed two 0 ohm SMD resistor settings to support Commodore 64 and probably many other retro computers with my modern USB controllers to joystick adapter.
For now I used an external 5V powersupply, as you can only draw a limited amount of current over the C64 joystick port* and power usage will depend on the controllers plugged into the adapter (the adapter itself uses very little). Will see first if there is interest at all for this adapter (maybe something similar already exist?). Anyway here is a video of the C64 prelimary version.
*It turns out the 100mA limit per Joystick port (200mA total), is a limit of what the stock powersupply can deliver safely while keeping the system stable. Otherwise the 5V on the joystick port is directly connected to the PSU input with a nice fat trace. So if using a better powersupply or the devices connected to the joystick port use less than 200 mA current, there is no need for external powersupply.
About mouse support. It is just joystick mode (1350). I cannot support the analog mouse mode (1351) with current PCB layout atleast.
Imperium Solo is a USB to joystick adapter, intended for using USB gamepads, like DualShock 3/4, XBOX One controller on retro computers. It’s also possible to use USB mouse. For now the project only supports the Amstrad CPC range of computers, but I plan to make firmware updates for use with other retro computers.
The firmware is updatable by pluggin in an USB stick/drive (FAT32) with the correct file when the adapter is powered on.
Special supported controllers are only DualShock 3, DualShock 4, XBox One controller and SNES USB controller. Other USB HID controllers should work by using my generic HID parser, but controller mapping may not be ideal for those. So I hope to add more controllers with the help of feedback from users.
USB Mouse is also using my generic HID parser, which atleast works with the 5 different USB mice I had laying around. At a point I made a custom mouse mode, with 5 bit resolution for delta values making it possible to get much better mouse feeling(proportional mode). This may be implemented to a later firmware update, if there is demand (it will need adapted software to be usable).
Made as compact as possible!
Below you can see a video of :
Installation/Connecting (notice most other retro computeres have power on the joystick port, so will not need DC splitter cable like the Amstrad is using)
Playing a game with USB controller
Playing a game with USB mouse
Playing a game with TWO usb controllers
Will update later with documentation (controller mapping, firmware upgrade etc).
Lastly expect another update, when I add firmware for the next retro computer.
The M4 board for the Amstrad CPC computer series has now surpassed more than 600 shipped units. And I expect to pass 700 units this year, if things continue as now.
Though there hasn’t been any recent updates on this blog for the M4 board, I have released some firmware updates adding new features.
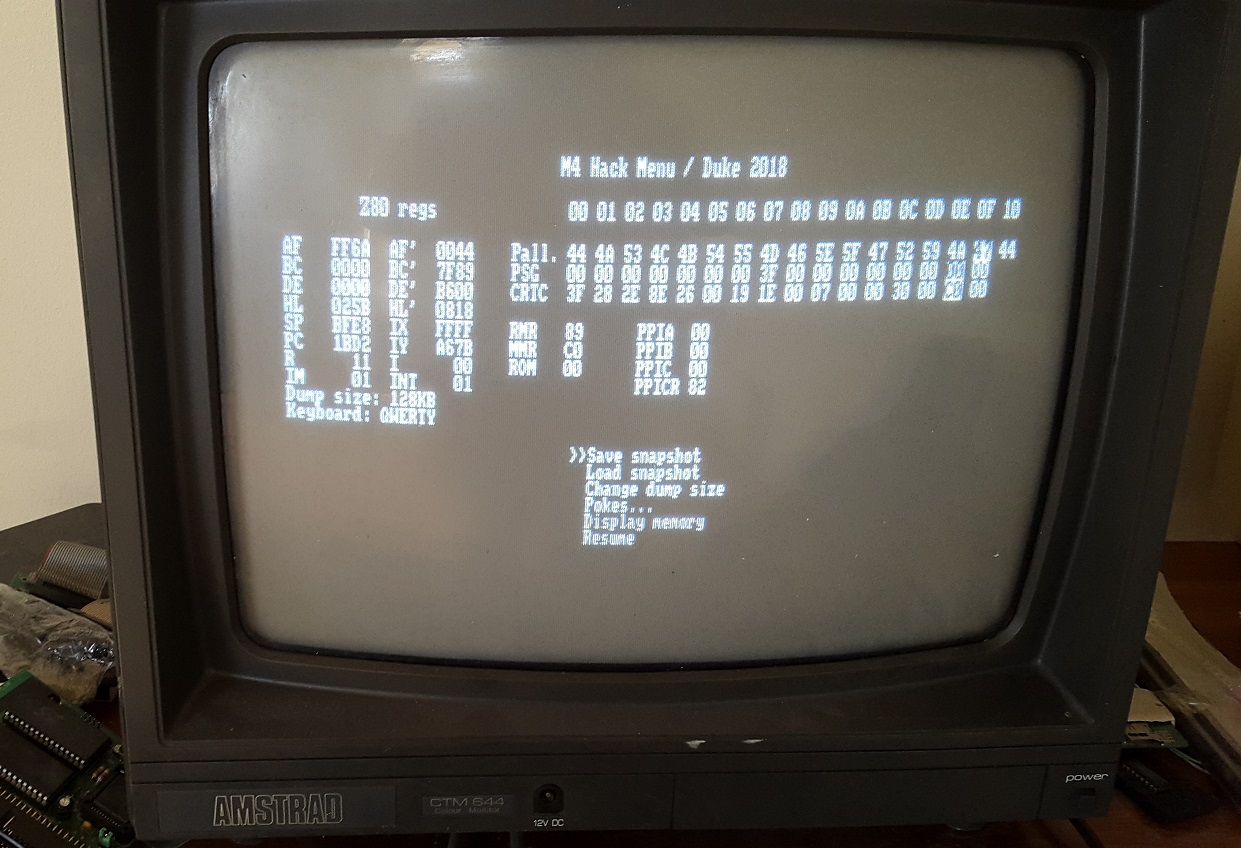
The biggest update came last year, when I added Hack Menu which is NMI triggering with ROM/RAM remapping. Making it possible to have “Multiface 2” like features.
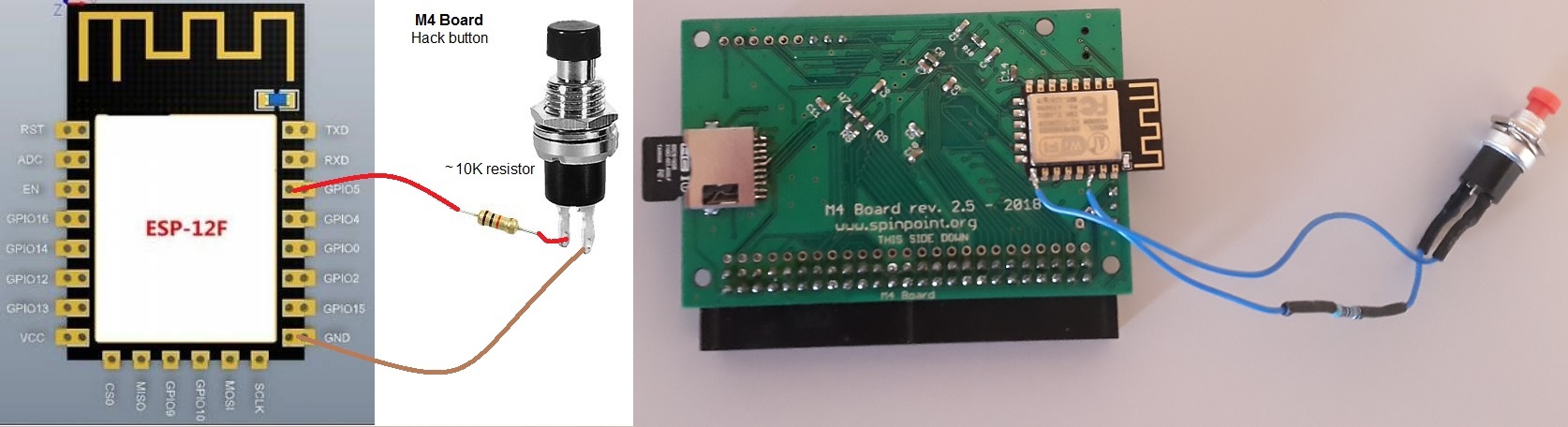
For existing users it can be launched via the web-interface or by manually soldering a switch onto the board.
As can be seen on the video above, it is now possible to save game progress and re-load it again, using the popular .SNA format, which is compatible with many emulators aswell.
However it is still in beta so it can crash under some circumstances. I expect to do some major software improvement to this Hack menu.
How to add the Hack button to existing PCB’s.
Adding Hack menu button
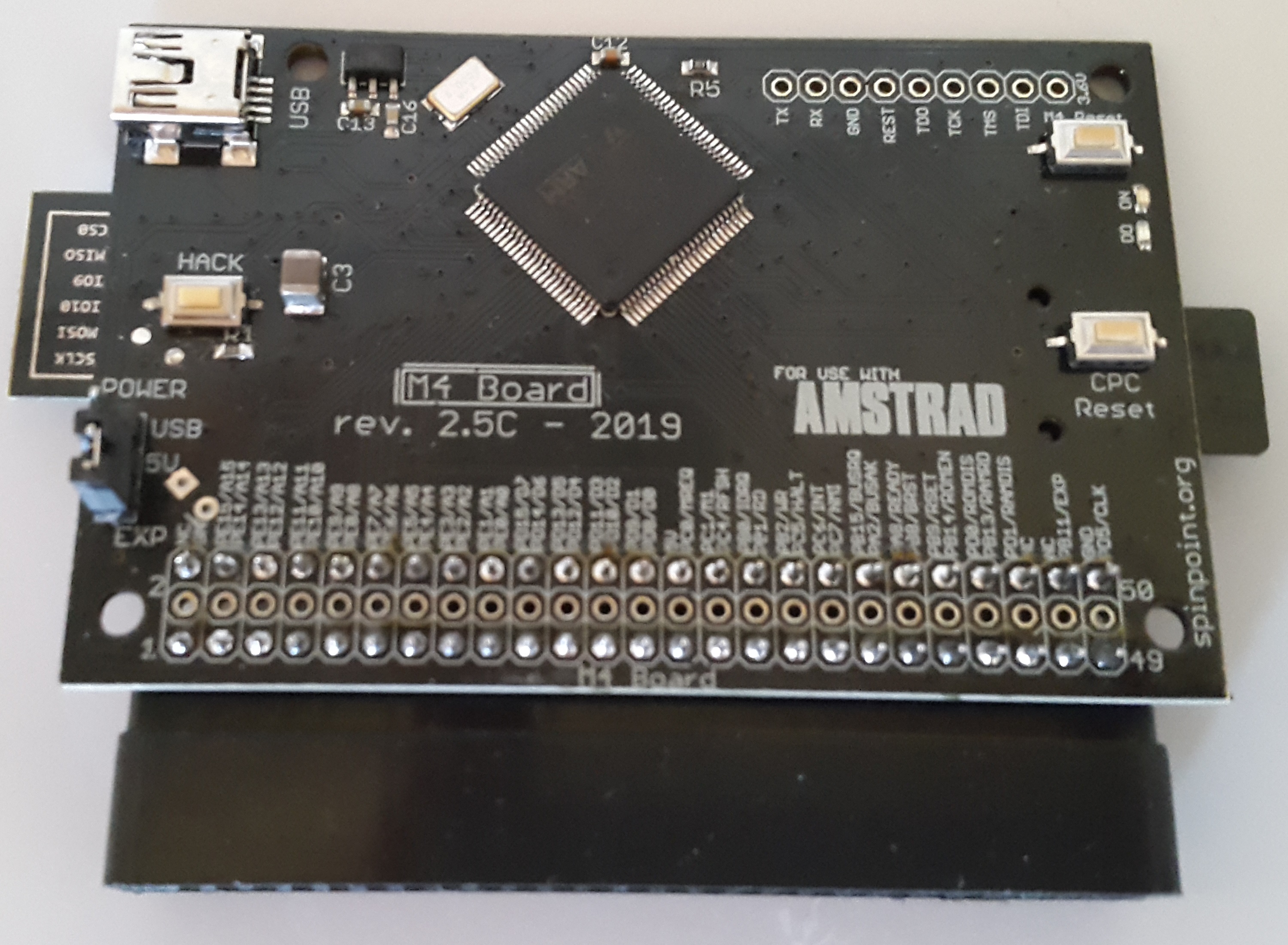
Meanwhile I updated the PCB once again to have this new Hack button.
Hack menu button added to PCB (left – middle)
The PCB now being version 2.5C.
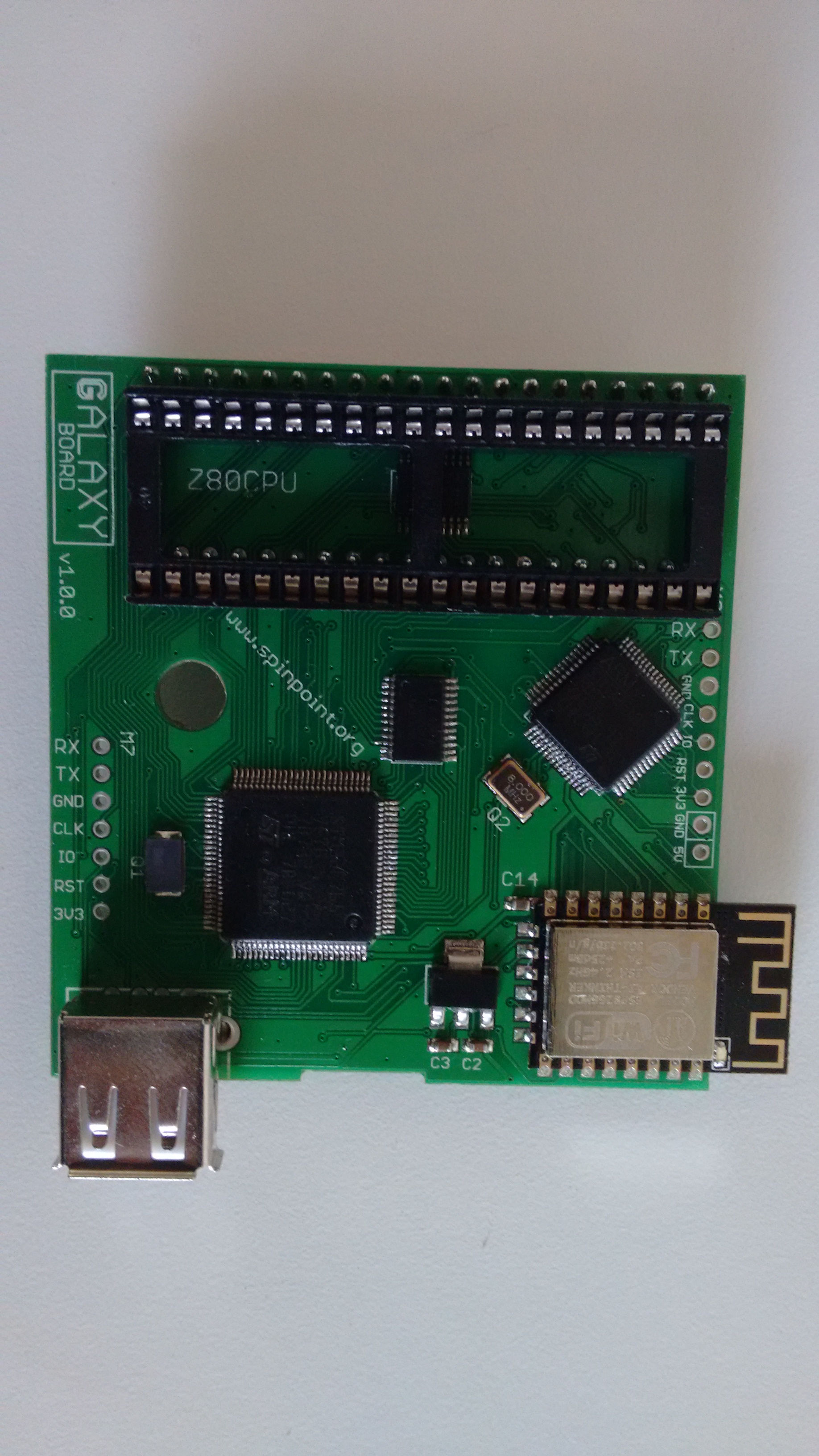
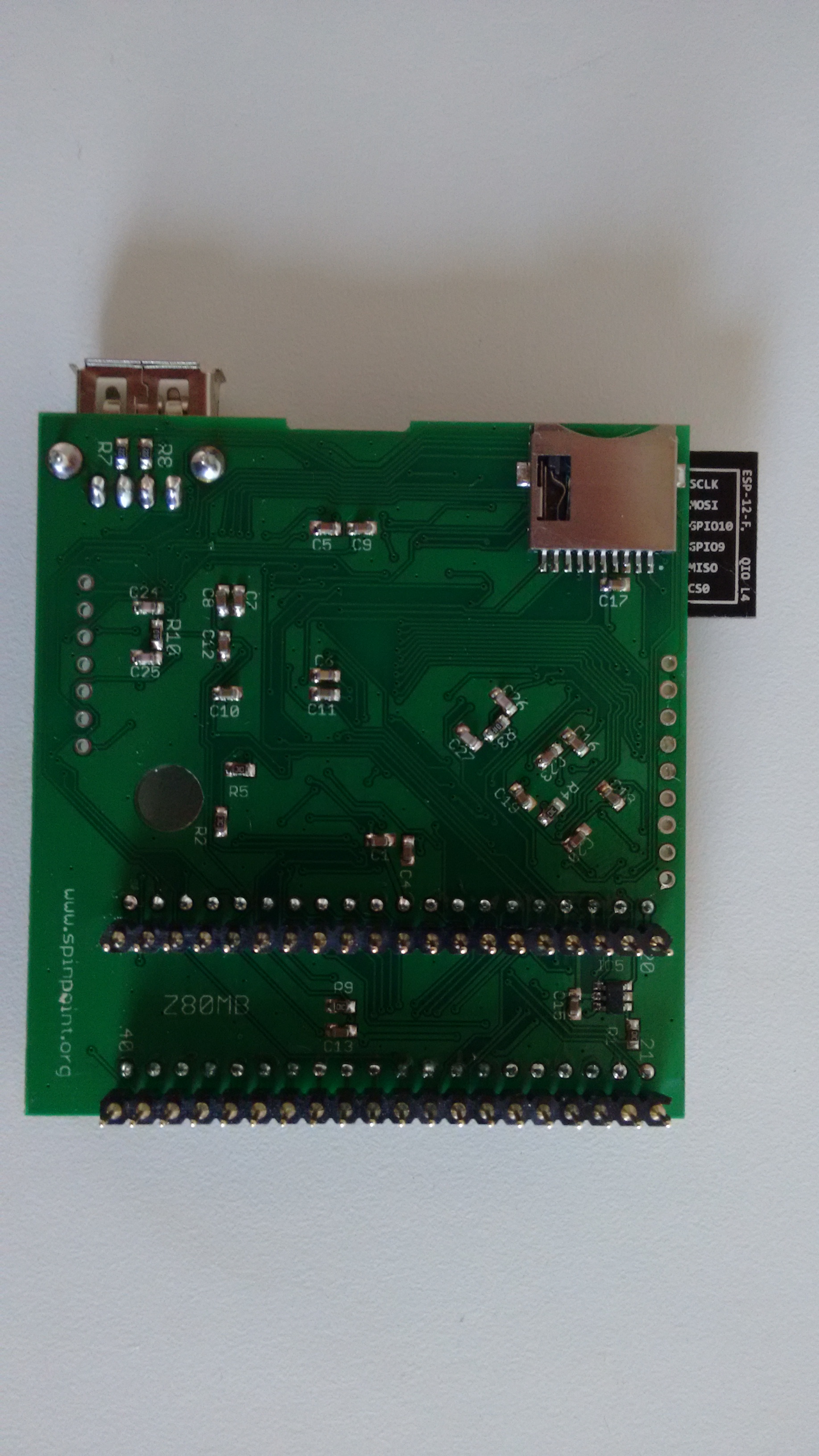
M7 Board
So what about M7 / Galaxy Board / Zen80 board ? It’s not cancelled, but I haven’t really worked on it for a long while, I do have some overall changes in mind and hope to pick it up again.
Imperium Solo
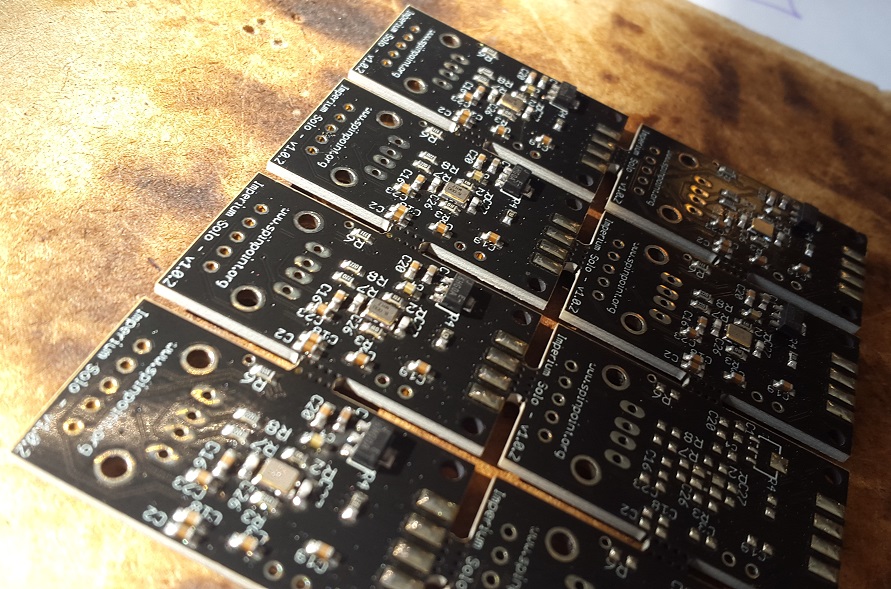
Beta PCB hacks!
Imperium Solo – USB joypads
I also made a USB to joystick adapter called Imperium Solo, which is also partial functionality of the Galaxy board. Its intended use is to be able to connect USB joypads and mouses to the joystick port. For now it supports CPC, but later it’s meant to be working with ZX Spectrum +2/+3, C64, Atari ST and Amiga. Or well lets wait and see 😉
Video showing the use of Dualshock 3/4 controllers on an Amstrad CPC!
I will update more on this soon, as I am awaiting the final PCB.
Another board I started a long time ago, but due to time/life, has been on the shelf.
M7 board is connected between a Z80 and it’s dil socket.
For starters aimed at the Amstrad GX4000 console (and of course the other Amstrads), boosting it to be a full blown CPC+ computer. But maybe later other Z80 based computers.
It gives similar features of M4 board ie.:
WiFi abilities
SD card as mass storage
Rom board
Cartridge emulation
and much more.
However due to the design it will be able to offer more than the M4 board.
The Z80 datalines can be intercepted, so technically any hardware can be emulated on the Cortex M7 chip (disc drives, tapes, keyboard), providing the Cortex-M7 can keep up.
The design is:
STM32F7 mcu handling the Z80 address, data and control lines, SD card.
STM32F1 mcu being USB host, interconnected to the Cortex-M7, via 8 datalines and 4 address lines (covering the keyboard matrix).
ESP8266 handling the WiFi, connected via SPI to the Cortex-M7
Level converter between Z80 datalines to STM32F7 with OE signal
And a bus switch to seperate the Z80 datalines from the motherboard, this way any response on an I/O port for example can be “replaced”.
Planned features for starters is, expanding ram, probably I will spare 256KB + the internal 64 KB for starters.
Add key+mouse option (via ie. logitech unified) through the USB socket.
Debugging signals on a CPC464 and physical layout.
And of course the cpcxfer program, to conveniently transfer files between pc and the amstrad cpc over WiFi via commandline. https://github.com/M4Duke/cpcxfer
Prodatron wrote support for M4 in his great SymbOS (http://www.symbos.de)
Giving you the ability to chat on IRC, download files via wget, copy files between floppies & sd and much much more.